Тренажер из Академгородка отправлен в Звездный
Специалисты компании «СофтЛаб-НСК» усовершенствовали систему имитации фотосъемки земной поверхности с орбиты.
Успешные практики создания в новосибирском Академгородке узлов виртуальной реальности для подготовки космонавтов имеют долгую историю. «Еще в 1980-х годах в Институте автоматики и электрометрии СО РАН начали разрабатывать синтезирующие системы визуальной обстановки для использования в тренажёрах для подготовки космонавтов, специально созданные для этого компьютеры “Аксай”, а затем “Альбатрос”, — рассказала директор «СофтЛаба» Ирина Аманжоловна Травина. — Эти машины специализировались на отрисовке трехмерных изображений и динамических сцен в реальном времени. Когда персональные компьютеры и графические карты по скорости выдачи “картинки” и её качеству стали сравнимы со стационарными, работы плавно перешли на них. Одновременно с этим начался период перестройки и реформ, на базе ИАиЭ СО РАН выросло несколько программистских компаний, включая нашу».
В 1992 году «СофтЛабом» был разработан первый графический «движок» (пакет программ) для создания изображений, их анимации и рендеринга. Появилась возможность отображать на экране траектории движения в пространстве множества трехмерных объектов, что сделало разработку перспективной для подготовки не только космонавтов, но и операторов другой подвижной техники: летчиков, водителей большегрузного транспорта, машинистов и диспетчеров на железной дороге. Самой первой работой «СофтЛаб-НСК» для космонавтов была система визуализации для тренажера стыковки корабля «Союз» с орбитальной станцией «Мир». Ирина Травина рассказала, что физическая имитация наблюдений из корабля в тренажерах в Центре подготовки космонавтов выполнена на сложной оптике в виде системы коллиматоров. После того, как на орбите Земли появилась Международная космическая станция (МКС), тренажёр стыковки был переработан для неё. Этот тренажёр входит в обязательную программу обучения всех космонавтов и астронавтов всех стран.
С программной точки зрения достаточно сложной задачей была графическая симуляция реального поведения множества объектов: самих космических аппаратов и их узлов, а также Земли, Луны, Солнца, созвездий. Очень важно в профессиональных тренажёрах быть максимально приближенным к тому, что происходит в реальности, что в действительности видит космонавт, находясь в космическом корабле или на орбитальной станции. Эта часть работы используется во всех тренажерах, которые разрабатывает «СофтЛаб».
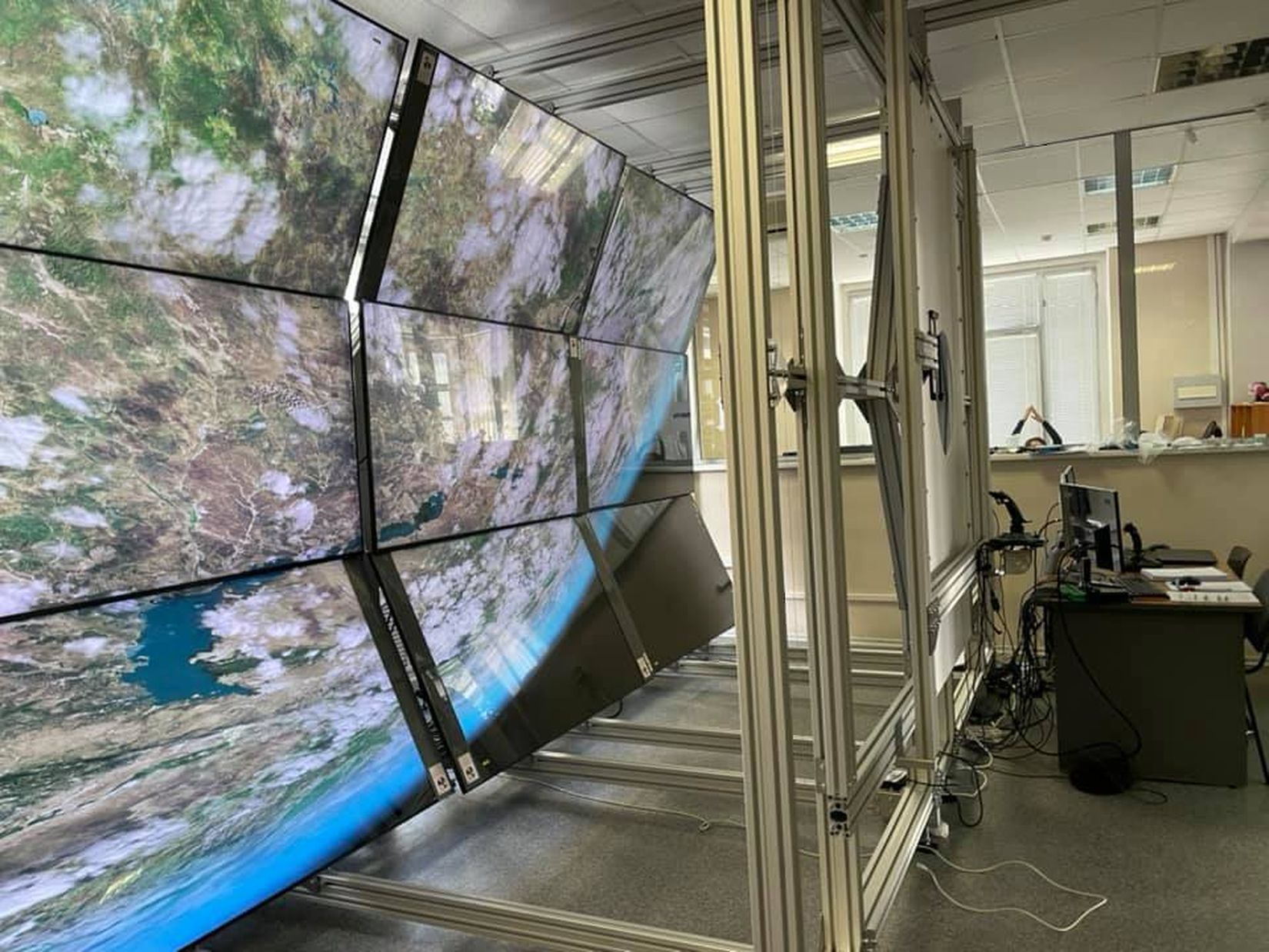
Со временем для компании появилась возможность и других работ. «Несколько лет назад для Центра подготовки космонавтов им. Ю.А. Гагарина в Звездном городке под Москвой мы разработали тренажер ВИН (тренажер визуально-инструментальных наблюдений Земли), и сейчас у нас есть заказ на его усовершенствование, — пояснила И. Травина. — Изначально для этого стенда-тренажёра была изготовлена часть интерьера МКС с иллюминатором, для визуализации изображения из которого вместо коллиматора мы встроили монитор. Следующим шагом стала замена монитора на видеостену из 9 ЖК-телевизоров с разрешением 4К, общим разрешением 12К. Причём телевизоры собраны под специально подобранными углами, формируя не плоскую стену, а часть цилиндра. Довольно много изменений пришлось внести и в программную часть комплекса». Эффект сферичности изображения возникает именно в точке наблюдения перед иллюминатором.

Именно такой космонавт видит Землю
Сегодняшний ВИН будет представлять из себя два рабочих места, инструктора и будущего космонавта. Обучаемый должен располагаться перед иллюминатором, изображение через которого будет формироваться на этой стене. Стена расположена за иллюминатором на расстоянии 2 метра, что даёт более широкий угол зрения. Ирина Травина подчеркнула, что картина, которую видят люди, полностью соответствует реальной — за исключением, разве что, текущих погодных условий на Земле: «Это не важно, поскольку никто не знает заранее, в какой день и час полетит тренирующийся космонавт. При этом вид земной поверхности воссоздан на основе множества снимков из космоса и в целом соответствует тому, что постоянно наблюдается с орбиты».
«Поскольку этот тренажер предназначен для обучения навыкам ведения визуально-инструментального наблюдения, космонавт должен уметь позиционироваться по Земле, причем в условиях облачности, быстро распознавать цель наблюдения на поверхности Земли, выполнить точное наведение фотокамеры и сделать фотосьемку с плавным увеличением масштаба, — рассказала Ирина Травина. — И это всё нужно успеть до того, как наблюдаемый объект выйдет из зоны видимости, то есть ориентировочно за 75 секунд. Для работы с фотокамерой сделан специальный стенд и программное обеспечение. Камера с одной стороны тяжелая и громоздкая, в другой — находится в невесомости. Поэтому сложность представляло и обеспечение эффекта невесомости камеры, да и сама камера была сэмулирована. Запчасти для неё изготовлены в Академпарке на 3D-принтере, процесс и результат фотосъемки сэмулирован программными средствами. Движется космическая станция, по двум траекториям перемещается земная поверхность, поэтому наведение камеры на объект является непростой задачей, требующей отработки навыков до полета».
Тестирование обновлённого тренажера завершилось, и программно-аппаратный комплекс отправлен в Звездный городок.

Председатель ассоциации «СибАкадемСофт» Ирина Аманжоловна Травина напомнила...

Новосибирский государственный университет с 2017 активно сотрудничает...

Национальный исследовательский университет «Высшая школа экономики» (НИУ...